Crean insectos robóticos, inspirados en abejas y hormigas, que pueden atravesar cualquier tipo de terreno y servir de ayuda en operaciones de rescate.

Según publica Science Robotics, Yasemin Ozkan- Aydin, especialista ingeniera y profesora asistente en la Universidad de Notre Dame, ha desarrollado pequeños robots con múltiples patas capaces de moverse en entornos complejos y realizar tareas de forma colectiva, como si fueran un enjambre de insectos.
Estos innovadores robots no han sido creados para acabar con nuestra paciencia, sino para que puedan ser utilizados en tareas de búsqueda y rescate, transporte de objetos, exploraciones espaciales y monitoreo ambiental.
INSECTOS ROBÓTICOS IMPRESOS EN 3D
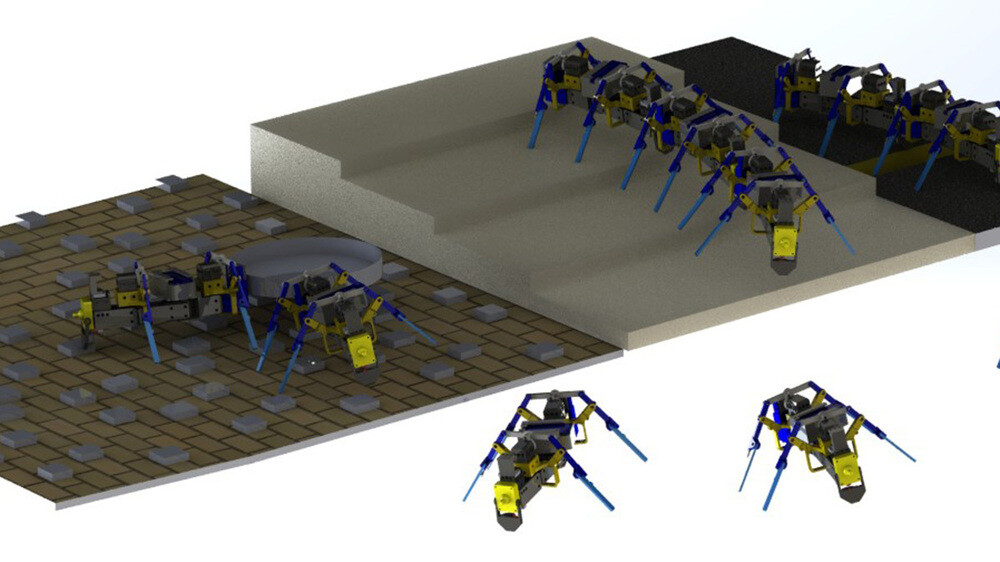
Estos robots, creados con impresión 3D, miden de 15 a 20 cm y están equipados con una batería de polímero de litio, un microprocesador y tres sensores: un sensor de luz en la parte delantera y dos sensores táctiles magnéticos en la parte delantera y trasera, lo que permite que se conecten entre sí.
Gracias a sus cuatro patas flexibles, se redujo la necesidad de sensores y piezas adicionales, dotando a los insectos robots del nivel de inteligencia mecánica necesaria para interactuar con terrenos accidentados o irregulares.
“No se necesitan sensores adicionales para detectar obstáculos porque la flexibilidad de las patas ayuda al robot a superarlos. Pueden pasar por los distintos huecos, construir un puente con sus cuerpos, mover objetos de forma individual o incluso compenetrarse para mover objetos de forma colectiva en distintos tipos de entornos, y de forma no muy diferentes a las hormigas”, afirma Ozkan- Aydin.
Ozkan-Aydin afirma que todavía hay mejoras por hacer en su diseño. Por ello, sus investigaciones futuras se centrarán en mejorar las capacidades de control, detección y potencia del sistema, que son esenciales para la locomoción y la resolución de problemas en el mundo real. También se plantea usar este sistema para explorar la dinámica de insectos como hormigas y termitas.